Vistas:0 Autor:Editor del sitio Hora de publicación: 2026-07-01 Origen:Sitio








La transición de un prototipo de laboratorio a una implementación comercial es un gran salto de ingeniería. Necesita una base sólida capaz de sobrevivir en entornos hostiles. Esta base física debe gestionar cargas útiles volátiles mientras mantiene un funcionamiento continuo. Sin embargo, una realidad frustrante azota hoy al mercado de la robótica. Innumerables plataformas RC para aficionados inundan la industria. Los fabricantes frecuentemente etiquetan estos modelos livianos como "resistentes" para atraer compradores comerciales. A menudo carecen de la integridad estructural necesaria para tareas industriales rigurosas. Creamos esta guía para ayudarlo a eliminar el ruido del marketing.
Nuestro propósito es proporcionar a los equipos de ingeniería y adquisiciones un marco pragmático basado en evidencia. Le mostraremos cómo evaluar un proveedor confiable para el despliegue industrial. Aprenderá a analizar las compensaciones técnicas y examinar las capacidades de los proveedores. En última instancia, descubrirá cómo seleccionar un socio de nivel industrial capaz de respaldar sus implementaciones robóticas a escala.
Los folletos de marketing a menudo desdibujan la línea entre los componentes de juguetes y el hardware industrial. Debe alejar la definición de afirmaciones de marketing vagas. En su lugar, confíe completamente en métricas cuantificables. Un verdadero chasis de robot móvil de alta resistencia debe soportar una capacidad de carga útil continua superior a los 100 kg. Las capacidades de ráfaga intermitente no cuentan para implementaciones comerciales. También debe evaluar las calificaciones de protección ambiental. Los sistemas de accionamiento y los controladores de motores requieren una clasificación mínima de IP65+. Las clasificaciones más bajas invitan a la entrada de polvo y daños por agua durante las operaciones al aire libre. Las plataformas reales de servicio pesado proporcionan curvas de torsión detalladas en lugar de simples afirmaciones de velocidad máxima.
La selección de materiales dicta directamente la capacidad de supervivencia de una plataforma. Las plataformas de aficionados suelen utilizar plásticos extruidos baratos o finas láminas de aluminio. Las aplicaciones industriales exigen plataformas totalmente metálicas. Debes analizar la necesidad de diferentes metales según tu carga útil. La aleación de aluminio ofrece una excelente resistencia a la corrosión y mantiene el peso total manejable. El acero de alta resistencia proporciona un límite elástico superior para cargas útiles extremas. También es necesario examinar la integridad estructural. Los marcos atornillados ofrecen un mantenimiento más fácil, pero pueden aflojarse bajo vibración continua. Los marcos soldados proporcionan una rigidez superior para impactos todoterreno. El siguiente cuadro resume estas compensaciones materiales.
| Tipo de material | Resistencia a la tracción | Peso Impacto | Escenario de aplicación ideal |
|---|---|---|---|
| Aluminio estándar (p. ej., 6061) | Medio | Ligero | Logística interior, tareas exteriores de carga media. |
| Acero de alta resistencia | muy alto | Pesado | Minería, construcción, levantamiento de cargas extremas. |
| Acero inoxidable (304/316) | Alto | Pesado | Ambientes corrosivos, procesamiento químico. |
Las aplicaciones en exteriores y todoterreno introducen variables impredecibles. Se deben establecer criterios estrictos de resiliencia ambiental. La absorción de impactos es fundamental para proteger sensores sensibles montados en la parte superior como LiDAR. Una amortiguación insuficiente traduce las vibraciones del terreno directamente a su pila de navegación. La distancia al suelo también determina la capacidad todoterreno. Un espacio libre bajo provoca un alto centrado en rocas o escombros. Finalmente, debes evaluar la gestión térmica. Los compartimientos cerrados del motor atrapan el calor rápidamente durante operaciones continuas de alto torque. Los chasis industriales utilizan disipadores de calor pasivos o refrigeración activa para evitar la desmagnetización del motor.
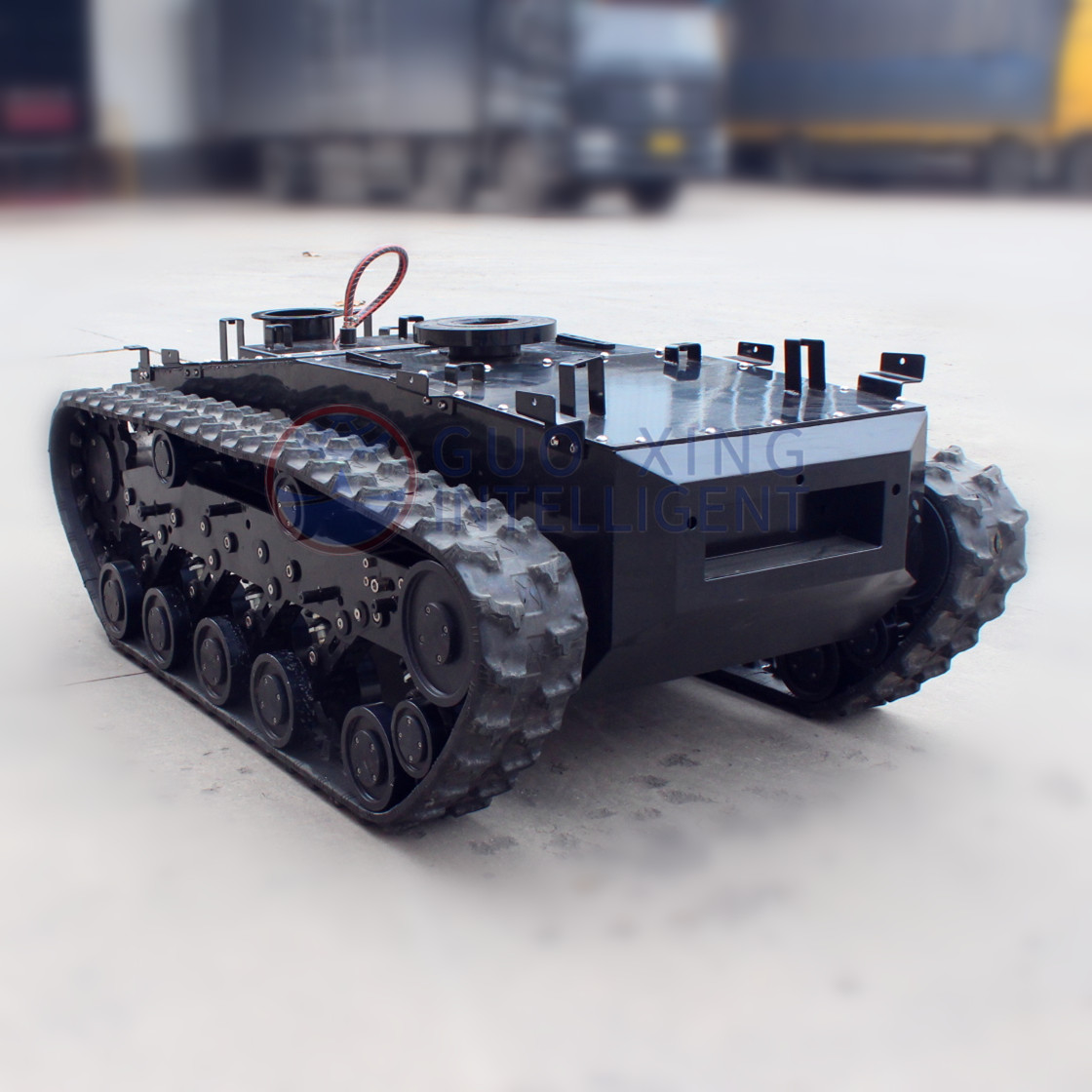
Las pistas determinan cómo interactúa su robot con el mundo físico. La selección de materiales depende en gran medida de su entorno de implementación.
No se puede evaluar la absorción de impactos sin examinar los mecanismos de suspensión específicos. Los sistemas de suspensión de Christie utilizan ruedas grandes y brazos de arrastre. Permiten viajar a alta velocidad en terrenos todoterreno irregulares. Las suspensiones del bogie agrupan las ruedas para distribuir pesos masivos sobre terreno blando. Debe comparar configuraciones de suspensión independientes con configuraciones rígidas. Los sistemas independientes manejan los obstáculos de manera brillante. Por el contrario, las configuraciones rígidas proporcionan una cinemática predecible para entornos de superficie plana. Las orugas rígidas garantizan la estabilidad al transportar cargas útiles muy pesadas en los almacenes.
Una plataforma de servicio pesado vive o muere según su tren motriz. Los motores de hobby se queman rápidamente bajo tensión comercial. Debes validar estrictamente las especificaciones técnicas.
Las aplicaciones industriales exigen motores CC sin escobillas (BLDC) combinados con cajas de engranajes planetarios. Las cajas de cambios planetarias distribuyen cargas entre múltiples engranajes. Esto evita que los dientes se rompan en caso de fuerte aceleración.
Encontrar un proveedor competente de chasis de tanque para robots va más allá de comparar hojas de especificaciones. Un socio confiable actúa como una extensión de su equipo de ingeniería. Deben proporcionar modelos CAD 3D accesibles. Necesita estos archivos STEP o IGES para diseñar sus cargas útiles de placa superior. Un proveedor profesional también suministra datos cinestésicos para entornos de simulación. Debe exigir curvas de rendimiento precisas. Estos documentos ilustran cómo se comportan los motores bajo tensión térmica. La falta de documentación básica suele indicar una operación amateur.
Muchas empresas simplemente cambian el nombre de sus plataformas genéricas. Debe evaluar si el proveedor fabrica componentes principales o simplemente actúa como ensamblador. Los ensambladores a menudo tienen dificultades para controlar la calidad o garantizar la disponibilidad de las piezas a largo plazo. Solicite transparencia total en la lista de materiales (BOM). Necesita conocer la marca exacta de motores, impulsores y correas de oruga. La transparencia de la lista de materiales garantiza sus futuras capacidades de mantenimiento. Si un chip controlador específico se agota, necesita un camino alternativo a seguir.
Su proyecto de I+D inevitablemente requerirá ajustes de hardware. Debe evaluar la capacidad del proveedor para modificar plataformas estándar. ¿Pueden ajustar las dimensiones del chasis o los puntos de montaje fácilmente? ¿Pueden cambiar las relaciones de transmisión para obtener más torque? Debe solicitar estos cambios sin generar costos prohibitivos de ingeniería no recurrentes (NRE). Los diseños modulares estandarizados permiten modificaciones rápidas. Los plazos de entrega excesivos para ajustes menores paralizarán todo el cronograma de implementación.
Los compradores industriales exigen pruebas de fiabilidad. Investigar las metodologías de prueba internas del fabricante. ¿Realizan rigurosas pruebas de carga dinámica? Debe solicitar informes de validación del ángulo de inclinación. Estos informes demuestran que el robot no girará en pendientes específicas. Además, las certificaciones industriales relevantes demuestran madurez institucional. Busque certificaciones CE e ISO. Estas marcas garantizan que los sistemas eléctricos y mecánicos cumplan con los estándares de seguridad internacionales.
| Metodología de Prueba Propósito Indicador | de Aprobado | /Reprobado |
|---|---|---|
| Pruebas de carga dinámica | Simula cargas útiles en movimiento | Sin deflexión estructural bajo carga máxima. |
| Validación del ángulo de inclinación | Determina el centro de gravedad. | Mantiene la estabilidad en pendientes de más de 30 grados. |
| Pruebas de estrés térmico | Comprueba la refrigeración del motor. | Las temperaturas de funcionamiento se mantienen por debajo de los 85 °C continuamente. |
Los vehículos de orugas giran derrapando. Este giro de pivote crea una inmensa fricción contra el suelo. En consecuencia, provoca picos masivos de consumo de energía. Debe abordar estas realidades eléctricas lo antes posible. Los bancos de baterías estándar a menudo activan su BMS interno durante un giro de pivote en superficies de alta fricción como el concreto. Debe dimensionar sus bancos de baterías en consecuencia. Asegúrese de que los controladores de su motor puedan manejar estos cortes repentinos de amperaje. Si esto se descuida, se producirán paradas espontáneas del robot durante maniobras básicas.
La excelencia mecánica no significa nada si no puedes controlar el chasis. Los controladores de motor propietarios plantean graves riesgos de integración. Algunos proveedores te obligan a entrar en ecosistemas de control de circuito cerrado. Debes evitarlos a toda costa. Las interfaces de hardware estándar como CAN bus y RS485 son absolutamente obligatorias. Ofrecen una comunicación fiable e inmune al ruido para entornos industriales. Además, la compatibilidad con ROS y ROS2 acelera su desarrollo. Los nodos controladores ROS verificados permiten una rápida integración de sensores avanzados como LiDAR y RTK GPS.
Las operaciones de campo rara vez son suaves. El desprendimiento de vías es una dura realidad en los despliegues todoterreno. El descarrilamiento generalmente ocurre durante operaciones en pendiente lateral. La gravedad empuja el pesado chasis cuesta abajo mientras las orugas se agarran a la pendiente. Debe valorar el chasis para sistemas tensores mecánicos accesibles. Los proveedores de calidad utilizan ruedas guía de ranura profunda para mantener las orugas alineadas. También diseñan pernos tensores que los operadores pueden alcanzar fácilmente. La reparabilidad en campo es primordial. Si una oruga se rompe, sus técnicos deben poder reemplazarla sin desmantelar todo el tren de transmisión.
Nunca se comprometa con un pedido por volumen sin una prueba de concepto rigurosa. Debe establecer criterios claros e indiscutibles de aprobación/rechazo para la prueba de concepto. Los objetivos vagos conducen a presupuestos desperdiciados. Anota los requisitos físicos exactos. Por ejemplo, el chasis debe atravesar una pendiente de 30 grados transportando una carga útil de 50 kg a 1 metro por segundo. Debe realizar giros de radio cero sobre asfalto seco sin activar la protección contra sobrecorriente. Documentar estas métricas responsabiliza al proveedor.
Comience sus pruebas comprando una plataforma de desarrollo lista para usar de sus proveedores preseleccionados. Evite solicitar modificaciones personalizadas complejas durante esta fase inicial. Primero debe probar la cinemática básica y la confiabilidad del conductor. Evalúe la calidad de construcción bruta de las soldaduras y la precisión de las piezas mecanizadas. Compruebe si los nodos ROS publicados se comunican perfectamente con el hardware. Una vez que la plataforma estándar supere sus métricas de PoC, podrá negociar con confianza modificaciones personalizadas para la producción en volumen.
Las capacidades físicas de su sistema autónomo están completamente dictadas por el chasis subyacente. Un algoritmo de navegación brillante no puede compensar una transmisión débil o vías descarriladas. Seleccionar el proveedor adecuado requiere equilibrar la solidez mecánica con la transparencia de la ingeniería. Necesita un socio que proporcione documentación honesta y utilice protocolos estándar confiables. Alentamos a los equipos de ingeniería a describir claramente sus requisitos no negociables de carga útil, terreno y API hoy. Bloquee estos parámetros antes de contratar a los fabricantes para solicitudes de cotización (RFQ). Este enfoque riguroso garantiza una transición exitosa del prototipo al producto listo para el campo.
R: Los plazos realistas varían según la personalización. Por lo general, puede esperar de 4 a 8 semanas para las unidades estándar de servicio pesado. Si necesita dimensiones personalizadas, relaciones de transmisión especializadas o patrones de montaje únicos, los plazos de entrega suelen extenderse de 10 a 16 semanas. Confirme siempre la disponibilidad de materia prima con su proveedor.
R: Las orugas ofrecen una distribución superior de la presión sobre el suelo. Se destacan en entornos todoterreno, embarrados o con muchos escombros donde las ruedas se hundirían. Por el contrario, las ruedas proporcionan una mayor eficiencia energética y velocidades máximas más rápidas en superficies planas y predecibles como el hormigón del almacén. Elija orugas para terrenos accidentados y ruedas para logística plana.
R: Sí, pero la integración física depende completamente del protocolo de comunicación del controlador del motor. Debe utilizar bus CAN o RS485. También debe verificar que el proveedor proporcione nodos de controlador precompilados para ROS o ROS2. Esto garantiza que su pila de navegación pueda enviar comandos de giro directamente al hardware.
R: El desprendimiento de orugas se debe a una tensión inadecuada y a fuerzas laterales extremas en pendientes. Al atravesar una pendiente de lado, las huellas se desprenden de las ruedas. Esto se puede evitar eligiendo chasis con ruedas guía de ranura profunda y sistemas tensores mecánicos robustos y de fácil acceso.